
12月3日上午,智能医学讲堂—智能医用材料青年学者沙龙圆满举行。
雷火电竞亚洲官网孙娜副研究员作了题为《软体机器人技术及其在生物医疗中的潜在应用》的专题报告,介绍了软体机器人技术及其在生物医疗领域的潜在应用,并分享她在软体机器人领域的最新研究工作进展和成果。
1.软体机器人“以柔克刚”的秘密
在很多人的印象中,机器人是冷冰冰的、机械的、僵硬的,这是因为传统机器人是以刚性结构为主,用来完成一些快速、精确、可重复位置或力控制的任务,具有结构复杂、灵活度有限、安全性和适应性较差等特点。自然界中的生物拥有柔软的身体、优良的灵活性和强大的环境适应性,这为机器人的发展提供了新思路。近年来, 随着3D打印技术和新型智能材料的发展,对机器人系统的研究有了突破性的进展并衍生出一门新的学科—软体机器人。软体机器人本体采用软材料或柔性材料加工而成,可连续变形, 从原理上具有无限自由度,自身良好的柔顺性和安全性弥补了刚性机器人的不足,能够适应各种非结构化环境,与人类的交互也更安全。
目前软体机器人的研究主要是以自然界的软体生物为原型,如蚯蚓、象鼻、章鱼、水母等,通过模仿软体动物的运动,可以实现蠕动、扭转、爬行、游动等多种运动形式, 具体可分为爬行机器人、游泳机器人、跳跃机器人以及抓取机器人。图1是几种典型的仿生软体机器人。整体而言,目前软体机器人研究还处于实验室阶段, 但软体机器人所具有的更高的安全性和更好的环境相容性,非常适合服务业和医疗领域。基于以上优点,软体机器人在工业生产、医疗服务、军事侦察等领域都有着很好的应用前景。
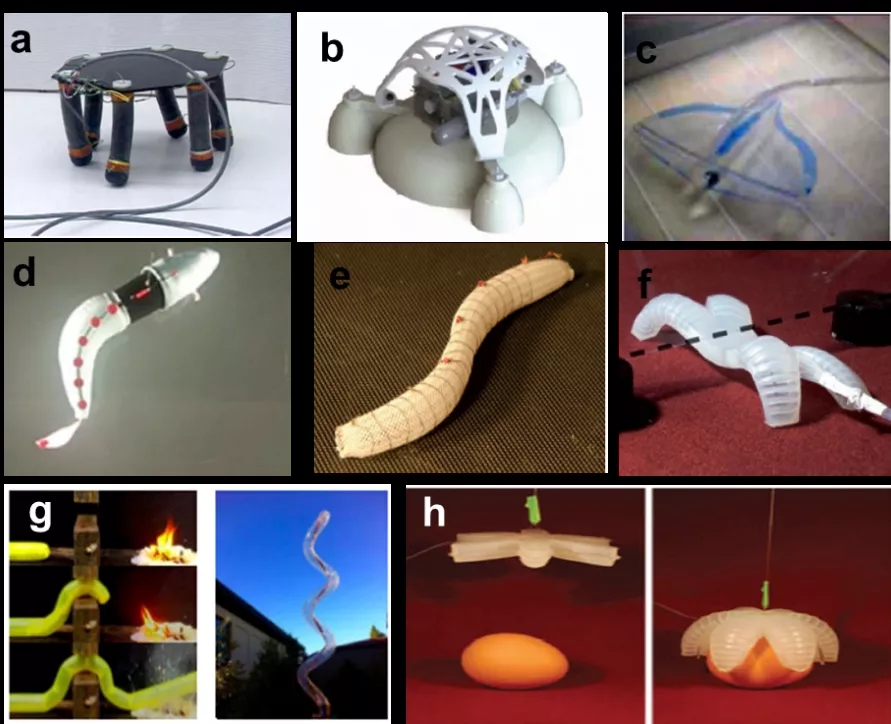
几种典型的仿生软体机器人:a.软体多足机器人; b.软体弹跳机器人; c.软体蝠鲼机器人; d.仿生软体鱼; e.仿生蠕虫机器人;
f.多步态四足机器人; g.软体生长机器人; h.软体抓取机器人
2.“人小鬼大”的软机器人有望成为医生的优秀助手
在与人类生命健康息息相关的医疗领域中,这种具有柔软身躯的机器人到底能干什么呢? 首先软体机器人或许可以成为人类身体的一部分。因为软体机器人的硬度、柔软度与人类皮肤和肌肉较为接近,因此科学家们希望它们未来能成为患者的假肢、人造外骨骼等可穿戴设备或用于模拟肌肉运动,弥补身体残缺。例如,心力衰竭是一种很常见的心脏疾病,哈佛大学与波士顿儿童医院合作开发出一种软体机械装置,他们给心脏发明了一个“围脖”,这个“围脖”可在不与血液接触的情况下帮助心脏跳动泵血,让弱不禁风的心脏恢复正常的工作能力。这种可定制的柔性设备,或催生出新的心力衰竭治疗方案,对于心衰患者来说是一个福音。
试想一下,如果让“软软的”机器人为病人做手术又是一种怎样的感受呢?如今, 在微创手术中,“人小鬼大”的软体机器人有望成为医生的医疗助手。软体机器人自身具有很高的柔韧性,所以能轻松地从小创口进入人体,并绕过脆弱的器官抵达患处,可以进一步减少手术创伤的可能性。科学在不断发展,相信用不了多久,软体机器人所具有的柔软自适应和安全等特点,未来在医疗领域将会涌现出更多的应用前景,未来可能会成为人类生活中重要的一部分。
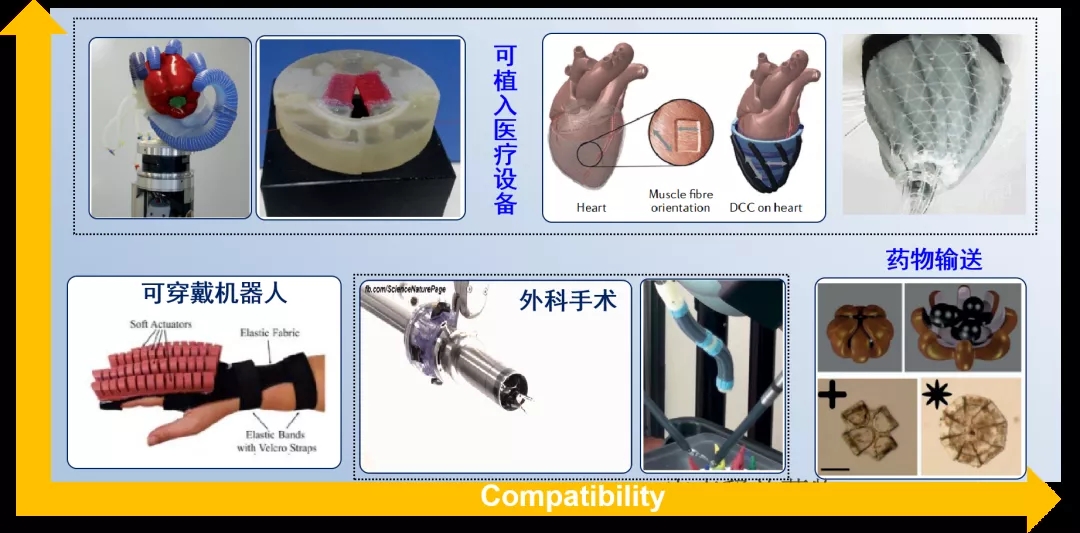
软体机器人在生物医疗领域的潜在应用
3.一种“软硬兼施”的软体抓取机器人
抓取机器人是软体机器人的一个重要分支,在人机交互、复杂易碎品抓持和狭小空间作业等方面具有不可比拟的优势。针对现有软体抓手难以实现狭窄空间、更宽广范围的稳定抓取这一重要问题, 孙娜及其研究团队基于仿生学原理,通过设计具有对称斜置气室的新型驱动器结构,开发了一种具有弯扭耦合变形的软体驱动器。
基于该软体驱动器,研究团队进一步创新设计了一种手指角度可调、手指间距精准可控的姿态可控的刚柔耦合抓取机器人,并对生活中各类常见物体进行了综合抓取性能测试。研究结果表明:该姿态可控的刚柔耦合抓取机器人只需两个驱动器就可以实现对于生活中常见不规则、不同尺寸的易碎和非易碎物体实现稳定抓持。未来,研究团队拟将该抓取机器人用于生物医疗实验室中易损易碎物品,比如试管,培养皿等的自动化的拿取与分拣,进一步可应用在微型移动无人实验室内用于典型病毒的智能化检测上。

典型物体抓取效果图
报告结束后,孙娜副研究员针对软体机器人技术发展面临的困难和挑战与在座的科研工作者进行了交流。通过相互探讨,大家加深了对软体机器人技术的了解,并期待后期能够建立合作,共同解决医学领域中的一些难点、痛点问题。

